Communication Protocols
Outline for communication standards used in the MUREX codebase
Carrier Board
The carrier board facilitates all functionality of the ROV, thus communication to and from the board is critical. We've opted to use two serial communication protocols for their unique advantages.
I2C
I2C is the primary protocol used for communication with peripherals on the carrier board such as the BME680 and the PCA9685.
I2C Primary
We will use I2C0 as our primary I2C bus.
- SDA: GPIO 0
- SCL: GPIO 1
I2C Secondary
We will use I2C3 as our backup I2C bus. (Should only be used in the event of absolute failure of I2C0)
- SDA: GPIO 4
- SCL: GPIO 5
UART
UART is the primary protocal used for inte-board communication. We will use UART to gather telemetry data from the other boards and control the MUREX ESC's
UART Primary
We will use UART0 as our primary bus.
- SDA: GPIO 14
- SCL: GPIO 15
UART Secondary
We will use UART3 as our backup bus. (Should only be used in the event of absolute failure of UART0)
- SDA: GPIO 4
- SCL: GPIO 5
Pinouts
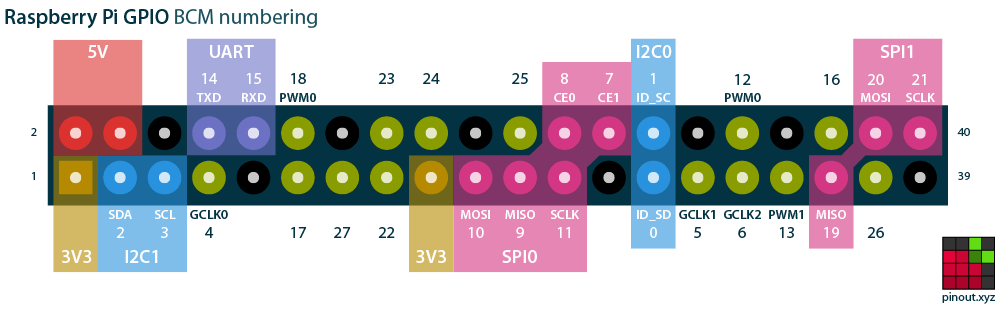
Raspberry Pi standard BCM GPIO pinout, from pinout.xyz
╭───────────────────────────────────────── Raspberry Pi Pico Pinout ─────────────────────────────────────────╮
│ ┏━━━━━┓ │
│ ┏━━━━┫ ┣━━━━┓ │
│ PWM0 A UART0 TX I2C0 SDA SPI0 RX GP0 ┃◎ ┗━━━━━┛ ◎┃ VBUS │
│ PWM0 B UART0 RX I2C0 SCL SPI0 CSn GP1 ┃◎ ▩ ◎┃ VSYS │
│ Ground ┃▣ └─GP25 ▣┃ Ground │
│ PWM1 A UART0 CTS I2C1 SDA SPI0 SCK GP2 ┃◎ ▒▒▒ ◎┃ 3v3 En │
│ PWM1 B UART0 RTS I2C1 SCL SPI0 TX GP3 ┃◎ ▒▒▒ ◎┃ 3v3 Out │
│ PWM2 A UART1 TX I2C0 SDA SPI0 RX GP4 ┃◎ ◎┃ ADC VRef │
│ PWM2 B UART1 RX I2C0 SCL SPI0 CSn GP5 ┃◎ ◎┃ GP28 / A2 SPI1 RX I2C0 SDA UART0 TX PWM6 A │
│ Ground ┃▣ ▣┃ ADC Ground │
│ PWM3 A UART1 CTS I2C1 SDA SPI0 SCK GP6 ┃◎ ▓▓▓▓▓▓▓ ◎┃ GP27 / A1 SPI1 TX I2C1 SCL UART1 RTS PWM5 B │
│ PWM3 B UART1 RTS I2C1 SCL SPI0 TX GP7 ┃◎ ▓▓▓▓▓▓▓ ◎┃ GP26 / A0 SPI1 SCK I2C1 SDA UART1 CTS PWM5 A │
│ PWM4 A UART1 TX I2C0 SDA SPI1 RX GP8 ┃◎ ▓▓▓▓▓▓▓ ◎┃ run │
│ PWM4 B UART1 RX I2C0 SCL SPI1 CSn GP9 ┃◎ ▓▓▓▓▓▓▓ ◎┃ GP22 SPI0 SCK I2C1 SDA UART1 CTS PWM3 A │
│ Ground ┃▣ ▣┃ Ground │
│ PWM5 A UART1 CTS I2C1 SDA SPI1 SCK GP10 ┃◎ ◎┃ GP21 SPI0 CSn I2C0 SCL UART1 RX PWM2 B │
│ PWM5 B UART1 RTS I2C1 SCL SPI1 TX GP11 ┃◎ ◎┃ GP20 SPI0 RX I2C0 SDA UART1 TX PWM2 A │
│ PWM6 A UART0 TX I2C0 SDA SPI1 RX GP12 ┃◎ ◎┃ GP19 SPI0 TX I2C1 SCL UART0 RTS PWM1 B │
│ PWM6 B UART0 RX I2C0 SCL SPI1 CSn GP13 ┃◎ ◎┃ GP18 SPI0 SCK I2C1 SDA UART0 CTS PWM1 A │
│ Ground ┃▣ ▣┃ Ground │
│ PWM7 A UART0 CTS I2C1 SDA SPI1 SCK GP14 ┃◎ ◎┃ GP17 SPI0 CSn I2C0 SCL UART0 RX PWM0 B │
│ PWM7 B UART0 RTS I2C1 SCL SPI1 TX GP15 ┃◎ ◎ ▣ ◎ ◎┃ GP16 SPI0 RX I2C0 SDA UART0 TX PWM0 A │
│ ┗━━━━━━━━━━━━━━━┛ │
│ @gadgetoid │
│ https://pico.pinout.xyz │
╰────────────────────────────────────────────────────────────────────────────────────────────────────────────╯Raspberry Pi Pico standard pinout, from pico.pinout.xyz